https://help.autodesk.com/view/ARNOL/ENU/?guid=arnold_user_guide_ac_denoising_html
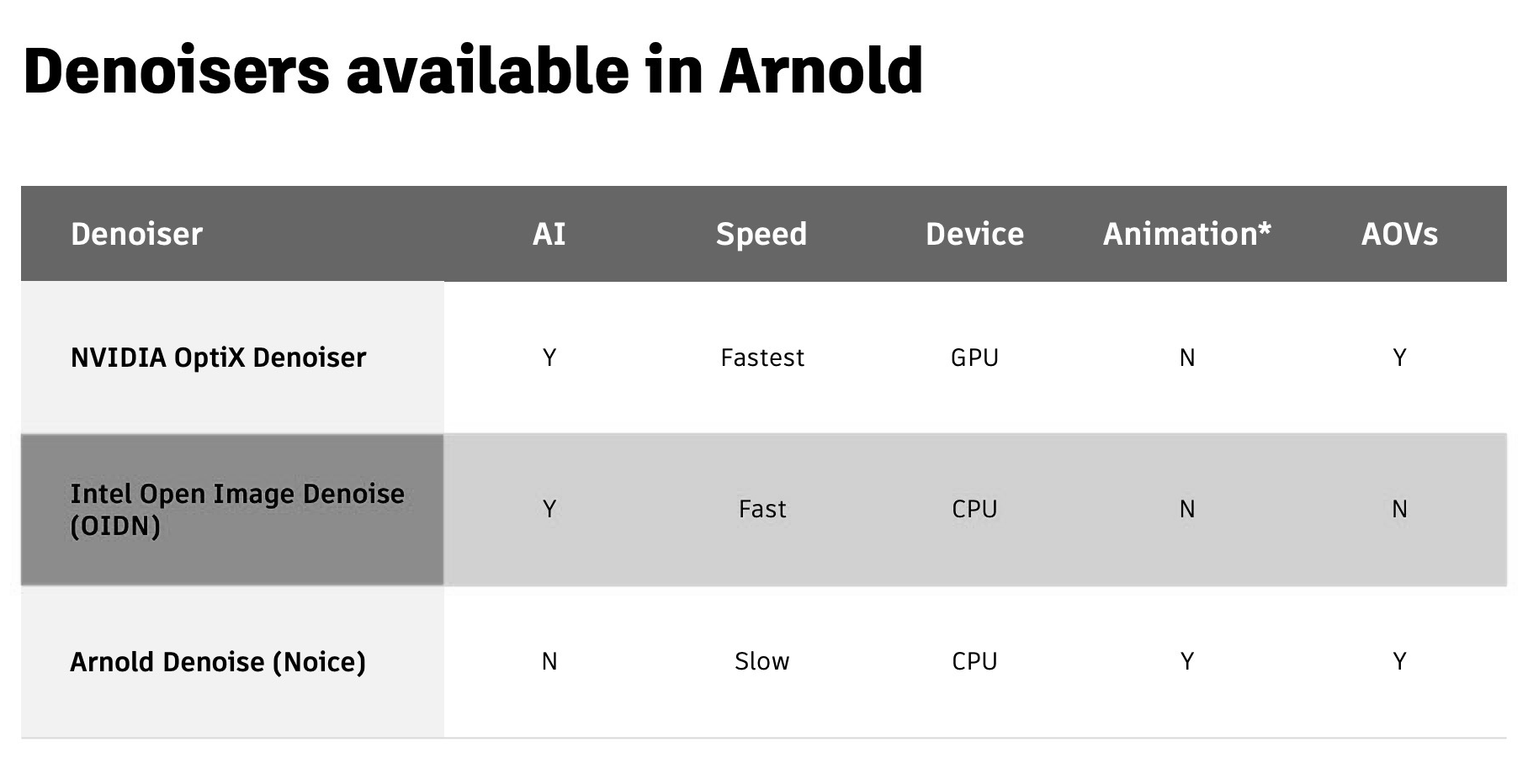
AOV denoising: While all denoisers work on arbitrary AOVs, not all denoisers guarantee that the denoised AOVs composite together to match the denoised beauty. The AOV column indicates whether a denoiser has robust AOV denoising and can produce a result where denoised_AOV_1 + denoised_AOV_2 + … + denoised_AOV_N = denoised_Beauty.
OptiX™ Denoiser imager
This imager is available as a post-processing effect. The imager also exposes additional controls for clamping and blending the result. It is based on Nvidia AI technology and is integrated into Arnold for use with IPR and look dev. The OptiX™ denoiser is meant to be used during IPR (so that you get a very quickly denoised image as you’re moving the camera and making other adjustments).
OIDN Denoiser imager
The OIDN denoiser (based on Intel’s Open Image Denoise technology) is available as a post-processing effect. It is integrated into Arnold for use with IPR as an imager (so that you get a very quickly denoised image as you’re moving the camera and making other adjustments).
Arnold Denoiser (Noice)
The Arnold Denoiser (Noice) can be run from a dedicated UI, exposed in the Denoiser, or as an imager, you will need to render images out first via the Arnold EXR driver with variance AOVs enabled. It is also available as a stand-alone program (noice.exe).
This imager is available as a post-processing effect. You can automatically denoise images every time you render a scene, edit the denoising settings and see the resulting image directly in the render view. It favors quality over speed and is, therefore, more suitable for high-quality final frame denoising and animation sequences.
Note:
imager_denoiser_noice does not support temporal denoising (required for denoising an animation).