In software development, “technical debt” is a term used to describe the accumulation of shortcuts, suboptimal solutions, and outdated code that occur as developers rush to meet deadlines or prioritize immediate goals over long-term maintainability. While this concept initially seems abstract, its consequences are concrete and can significantly affect the security, usability, and stability of software systems.
The Nature of Technical Debt
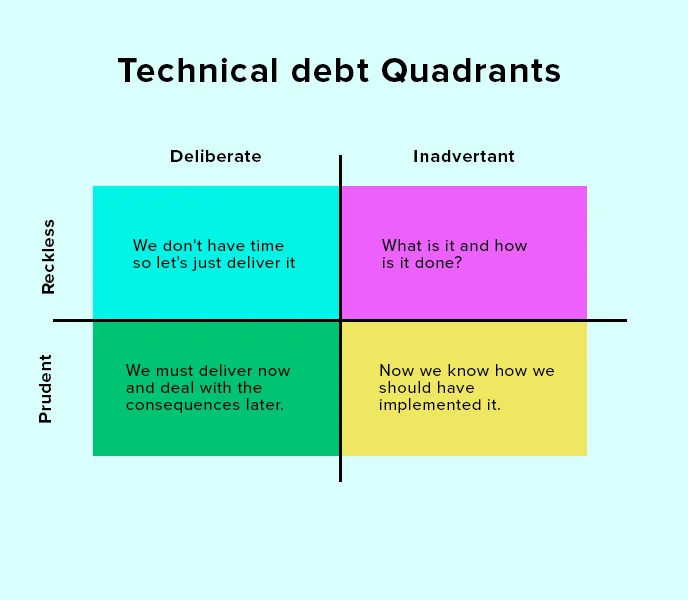
Technical debt arises when software engineers choose a less-than-ideal implementation in the interest of saving time or reducing upfront effort. Much like financial debt, these decisions come with an interest rate: over time, the cost of maintaining and updating the system increases, and more effort is required to fix problems that stem from earlier choices. In extreme cases, technical debt can slow development to a crawl, causing future updates or improvements to become far more difficult than they would have been with cleaner, more scalable code.
Impact on Security
One of the most significant threats posed by technical debt is the vulnerability it creates in terms of software security. Outdated code often lacks the latest security patches or is built on legacy systems that are no longer supported. Attackers can exploit these weaknesses, leading to data breaches, ransomware, or other forms of cybercrime. Furthermore, as systems grow more complex and the debt compounds, identifying and fixing vulnerabilities becomes increasingly challenging. Failing to address technical debt leaves an organization exposed to security risks that may only become apparent after a costly incident.
Impact on Usability
Technical debt also affects the user experience. Systems burdened by outdated code often become clunky and slow, leading to poor usability. Engineers may find themselves continuously patching minor issues rather than implementing larger, user-centric improvements. Over time, this results in a product that feels antiquated, is difficult to use, or lacks modern functionality. In a competitive market, poor usability can alienate users, causing a loss of confidence and driving them to alternative products or services.
Impact on Stability
Stability is another critical area impacted by technical debt. As developers add features or make updates to systems weighed down by previous quick fixes, they run the risk of introducing bugs or causing system crashes. The tangled, fragile nature of code laden with technical debt makes troubleshooting difficult and increases the likelihood of cascading failures. Over time, instability in the software can erode both the trust of users and the efficiency of the development team, as more resources are dedicated to resolving recurring issues rather than innovating or expanding the system’s capabilities.
The Long-Term Costs of Ignoring Technical Debt
While technical debt can provide short-term gains by speeding up initial development, the long-term costs are much higher. Unaddressed technical debt can lead to project delays, escalating maintenance costs, and an ever-widening gap between current code and modern best practices. The more technical debt accumulates, the harder and more expensive it becomes to address. For many companies, failing to pay down this debt eventually results in a critical juncture: either invest heavily in refactoring the codebase or face an expensive overhaul to rebuild from the ground up.
Conclusion
Technical debt is an unavoidable aspect of software development, but understanding its perils is essential for minimizing its impact on security, usability, and stability. By actively managing technical debt—whether through regular refactoring, code audits, or simply prioritizing long-term quality over short-term expedience—organizations can avoid the most dangerous consequences and ensure their software remains robust and reliable in an ever-changing technological landscape.
https://insights.daffodilsw.com/blog/technical-debt