https://gapszju.github.io/RTG-SLAM/
https://github.com/MisEty/RTG-SLAM
https://gapszju.github.io/RTG-SLAM/static/pdfs/RTG-SLAM_arxiv.pdf
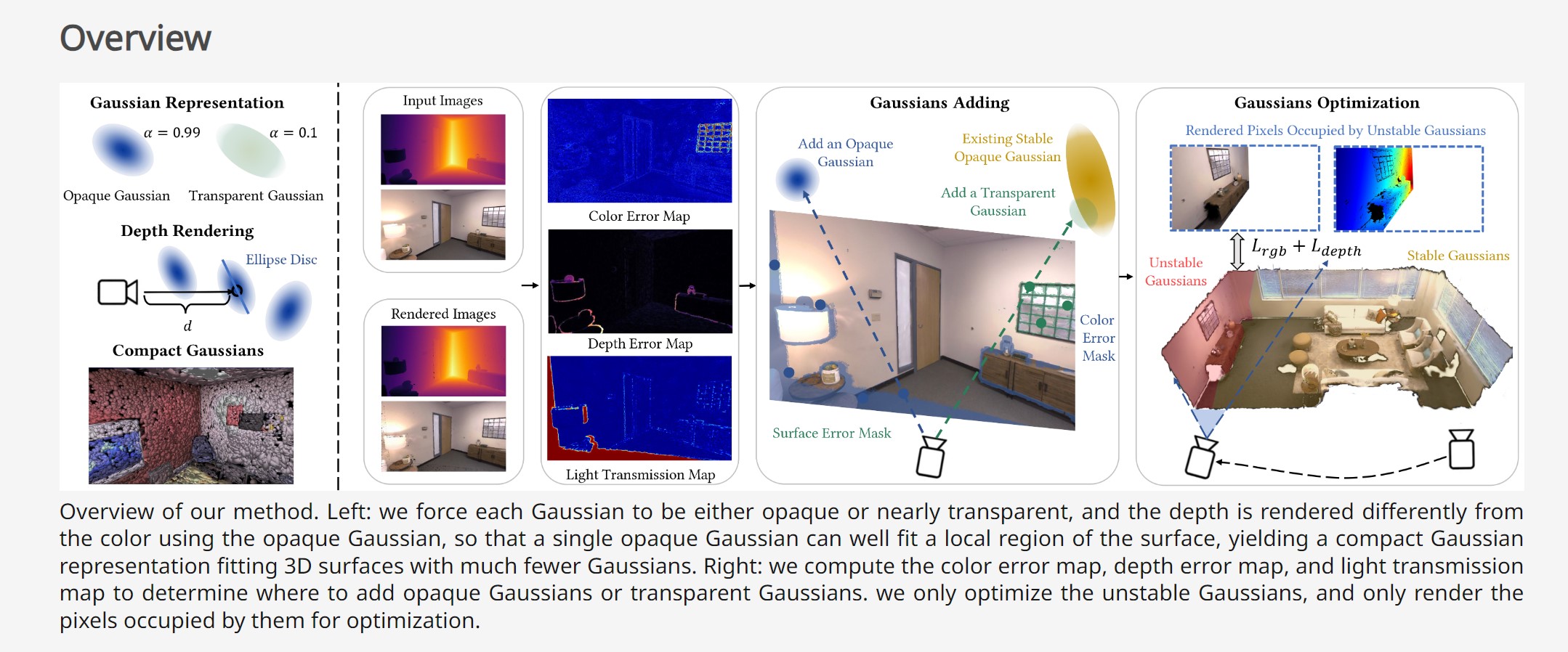
A Real-time Gaussian SLAM (RTG-SLAM), a real-time 3D reconstruction system with an RGBD camera for large-scale environments using Gaussian splatting.