elevr.com/elevrant-panoramic-twist/
Today we discuss panoramic 3d video capture and how understanding its geometry leads to some new potential focus techniques.
With ordinary 2-camera stereoscopy, like you see at a 3d movie, each camera captures its own partial panorama of video, so the two partial circles of video are part of two side-by-side panoramas, each centering on a different point (where the cameras are).
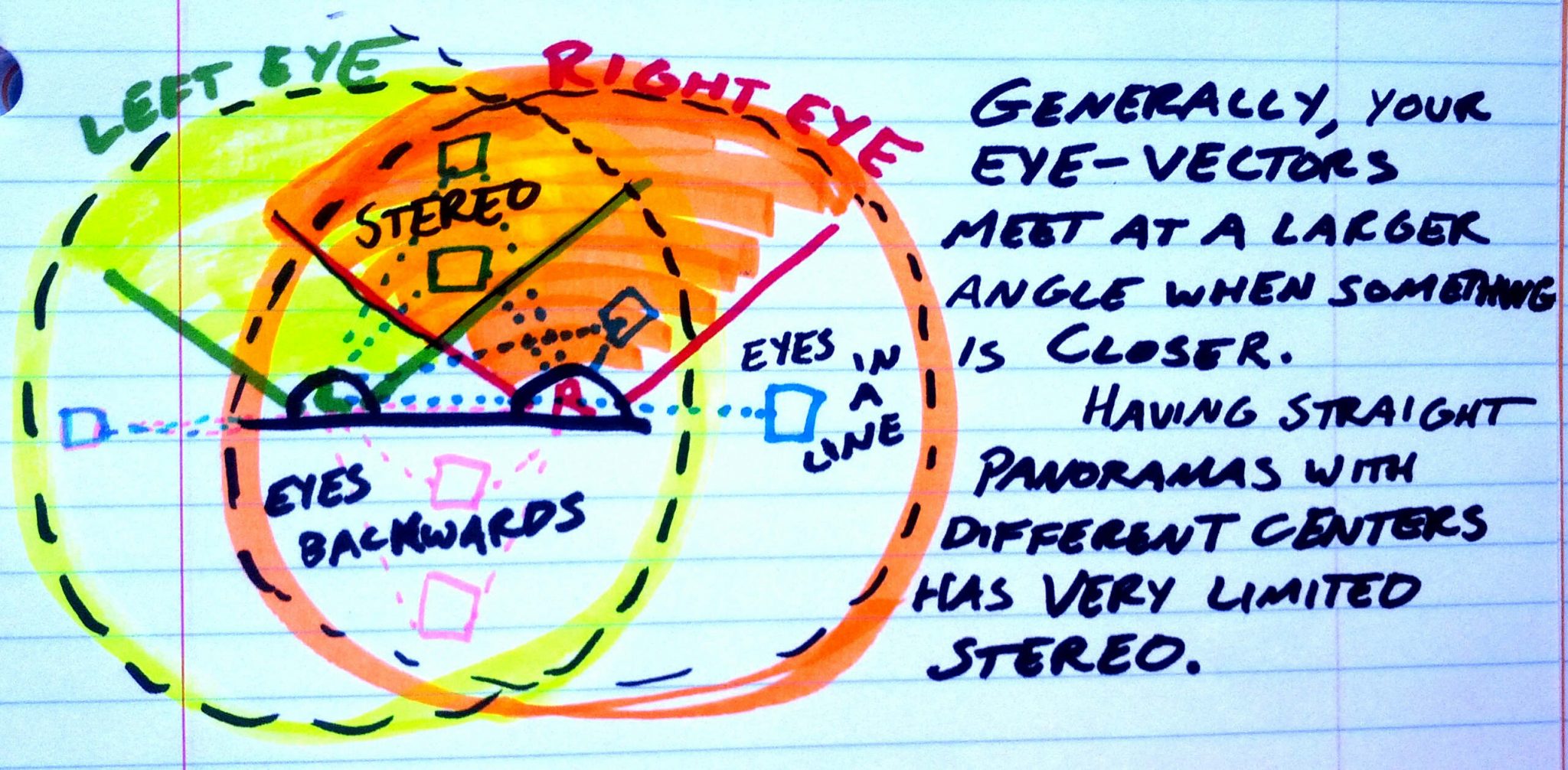
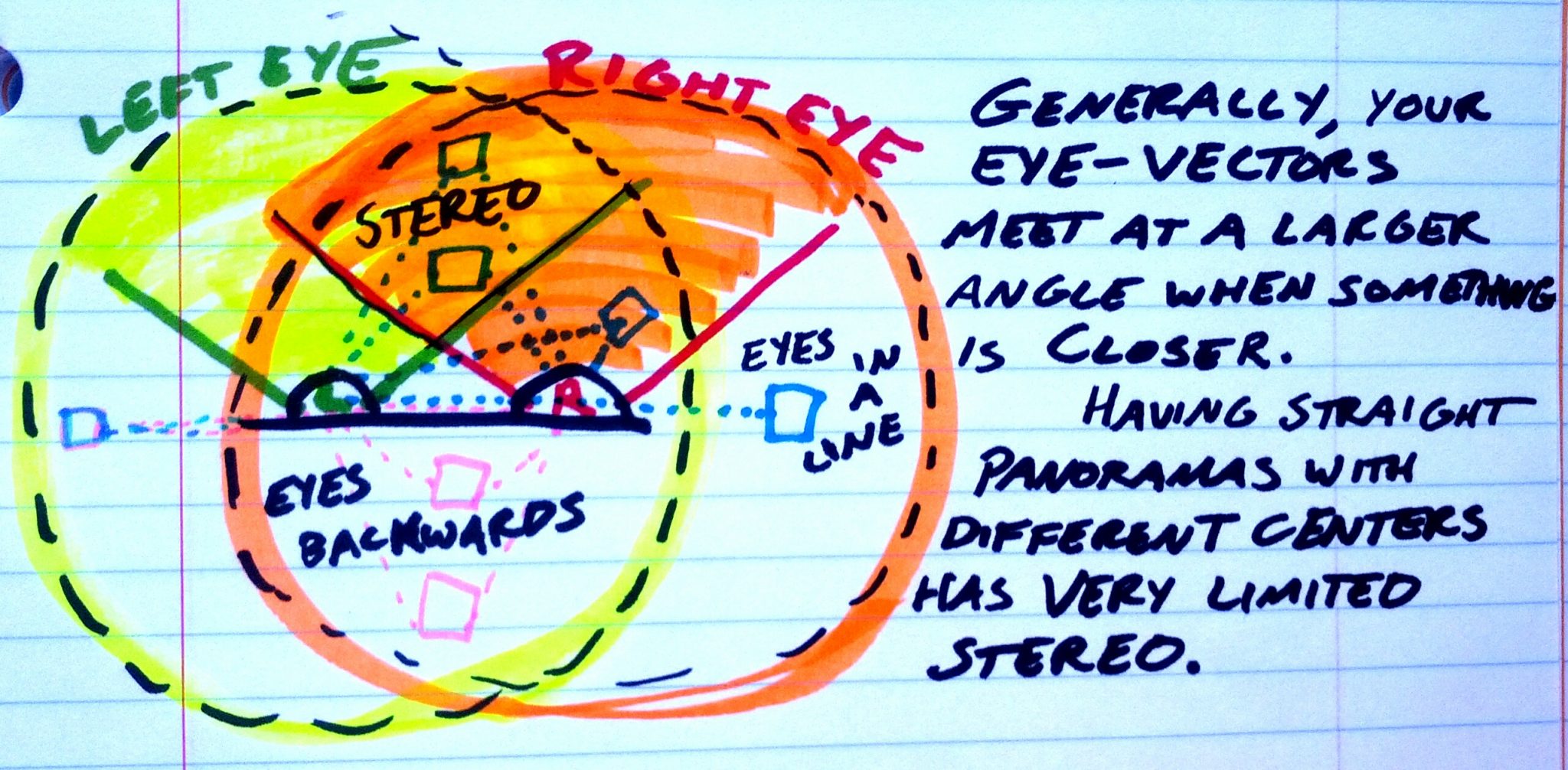
This is great if you want to stare straight ahead from a fixed position. The eyes can measure the depth of any object in the middle of this Venn diagram of overlap. I think of the line of sight as being vectors shooting out of your eyeballs, and when those vectors hit an object from different angles, you get 3d information. When something’s closer, the vectors hit at a wider angle, and when an object is really far away, the vectors approach being parallel.
But even if both these cameras captured spherically, you’d have problems once you turn your head. Your ability to measure depth lessens and lessens, with generally smaller vector angles, until when you’re staring directly to the right they overlap entirely, zero angle no matter how close or far something is. And when you turn to face behind you, the panoramas are backwards, in a way that makes it impossible to focus your eyes on anything.
So a setup with two separate 360 panoramas captured an eye-width apart is no good for actual panoramas.
But you can stitch together a panorama using pairs of cameras an eye-width apart, where the center of the panorama is not on any one camera but at the center of a ball of cameras. Depending on the field of view that gets captured and how it’s stitched together, a four-cameras-per-eye setup might produce something with more or less twist, and more or less twist-reduction between cameras. Ideally, you’d have a many camera setup that lets you get a fully symmetric twist around each panorama. Or, for a circle of lots of cameras facing directly outward, you could crop the footage for each camera: stitch together the right parts of each camera’s capture for the left eye, and the left parts of each camera’s capture for the right eye.